Digispark でサーボモーターを動かす
投稿者:マーチン 2020年4月19日
カテゴリ:障碍者全般::Digispark
カテゴリ:障碍者全般::Digispark
Digispark で小さなサーボモーターを動かすガジェットを作りました。工夫をすれば楽器をたたいたり、仕掛けをスタートさせるのに使えます。

●動画
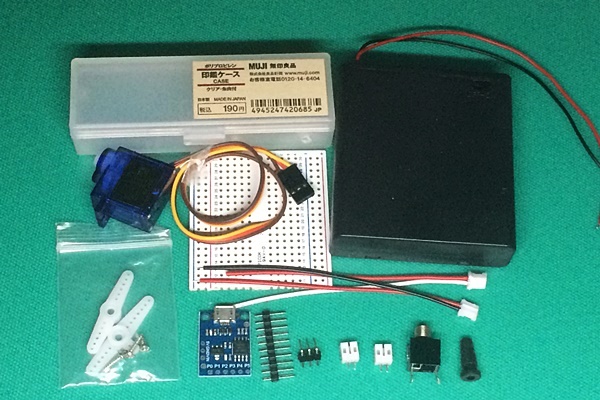
●購入品
| 品名 | 個数 | 価格 | 備考 |
|---|---|---|---|
| 【Amazon】Digispark Kickstarter Attiny85 マイクロ USB 開発ボード | 1 | 950円/3 | |
| 【無印良品】印鑑ケース | 1 | 190円 | |
| 【秋月】マイクロサーボ9g SG-90 | 1 | 400円 | |
| 【秋月】ユニバーサル基板(ブレッドボード配線パターンタイプ) | 1 | 90円 | |
| 【秋月】電池ボックス 単3×4本スイッチ付 | 1 | 110円 | |
| 【秋月】3.5㎜モノラルミニジャック MJ-355 | 1 | 50円 | |
| 【秋月】PHコネクタ トップ型 2P B2B-PH-K-S | 2 | 20円 | |
| 【秋月】コネクタ付コード2P(A) JST PH相当 | 2 | 60円 | |
| 【秋月】ピンヘッダ (L型) 1x6 | 1 | 10円 | |
| 【共立】スリーブ付きコードブッシュ 3φ LGT-6G | 1 | 10円 | |
| 【Amazon】エーモン ダブルコード 0,2sq 4m 黒/白ライン | 30cm | 261円/15 | |
| 【Amazon】ELPA スズメッキ線 φ0.6mm HK-SM06H | 少し | φ0.4~0.6mm | |
| 【鍋屋】1/4インチ 六角ナット 並目(1/4-20UNC) | 1 | 528円/10 | |
| 【Daiso】ミニ三脚 | 1 | 110円 | |
| 【Daiso】呼び鈴 | 1 | 110円 | |
| 【Daiso】工作材料 立方体 8個入 | 2 | 220円 | |
| 【Daiso】あぶらねんど | 1 | 110円 | |
| Φ5mmLED、結束バンド、熱収縮チューブ | |||
| 約2,000円 |

●サーボモータとは
サーボモータとは、位置や速度を制御できるモータのことです。micro:bit や Arduino でよく使われている小型のサーボモータ「デジタル・マイクロサーボ SG90」のスペックです。
・重量:9g
・外形寸法:22.2x11.8x31mm
・トルク:1.8kgf・cm(4.8V)
・動作速度:0.1秒/60度
・動作電圧:4.8V(~5V)
・温度範囲:0℃~55℃
・制御角:±約90度(180度)
・配線:茶=GND、赤=電源[+]、橙=制御信号 [JRタイプ]
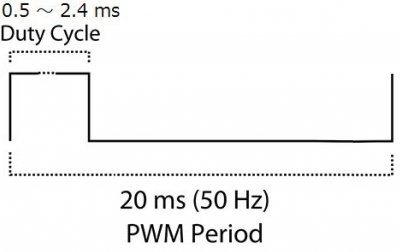
・PWMサイクル:20ms
・制御パルス:0.5ms~2.4ms
SG90は以下の波形で0.5msで0度、2.4msで180度になるという仕様です。ライブラリを使えば、これを意識する必要はありません。・外形寸法:22.2x11.8x31mm
・トルク:1.8kgf・cm(4.8V)
・動作速度:0.1秒/60度
・動作電圧:4.8V(~5V)
・温度範囲:0℃~55℃
・制御角:±約90度(180度)
・配線:茶=GND、赤=電源[+]、橙=制御信号 [JRタイプ]
・PWMサイクル:20ms
・制御パルス:0.5ms~2.4ms
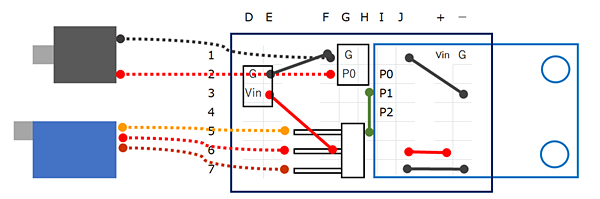
●回路図
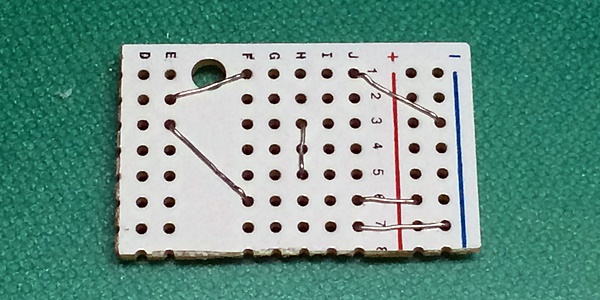
●製作手順 (前半)
(1)基板を8行とC列でカットする。1F~2E、3E~6F、3H~5H、1J~3-、6J~6+、7J~7- をスズメッキ線でつなぐ。
(2)L型ピンヘッダー、PHコネクタをはんだ付けする。
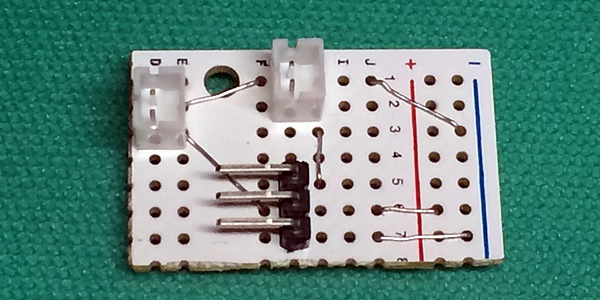
(3)ピンヘッダーを、2個と3個に切断して、GND、VIN と P0、1、2 の位置に置く(まだはんだ付けしない)。
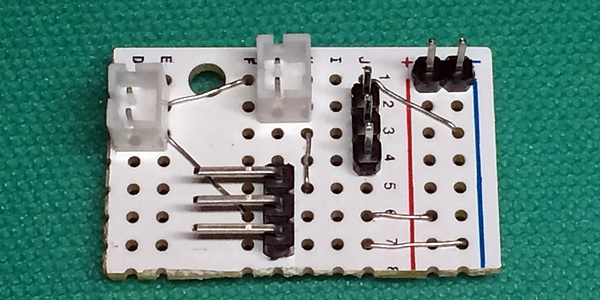
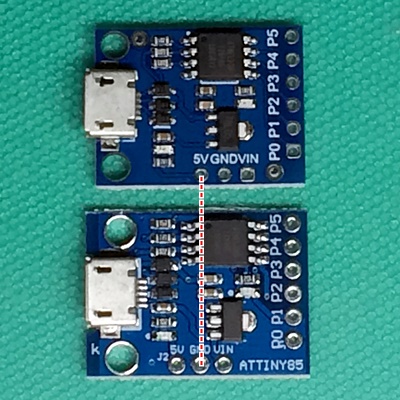
実は、購入時期によって、基板のサイズに違いがありました。GND、VIN を一致させ、P0、P1、P2を1列ずらしてください。
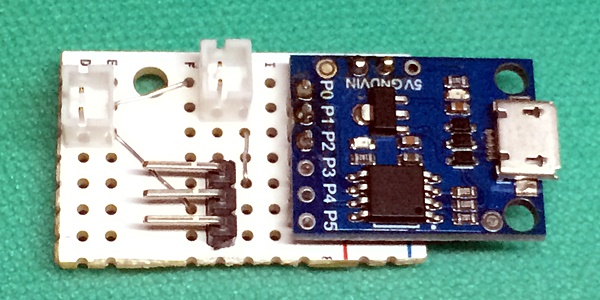
(4)基板をはんだ付けする。ピンヘッダーの余分な長さはカットする。
ピンヘッダーをきれいにはんだ付けするのは、初めての人は難しいかもしれません。1か所だけはんだ付けをして、おかしければ位置を修正してから、残りの箇所をはんだ付けします。
(2)L型ピンヘッダー、PHコネクタをはんだ付けする。
(3)ピンヘッダーを、2個と3個に切断して、GND、VIN と P0、1、2 の位置に置く(まだはんだ付けしない)。
実は、購入時期によって、基板のサイズに違いがありました。GND、VIN を一致させ、P0、P1、P2を1列ずらしてください。
(4)基板をはんだ付けする。ピンヘッダーの余分な長さはカットする。
ピンヘッダーをきれいにはんだ付けするのは、初めての人は難しいかもしれません。1か所だけはんだ付けをして、おかしければ位置を修正してから、残りの箇所をはんだ付けします。
●製作手順 (後半)
(1)印鑑ケースに、Φ5.5mm、Φ6.5mm、Φ6.5mm の穴をあける。
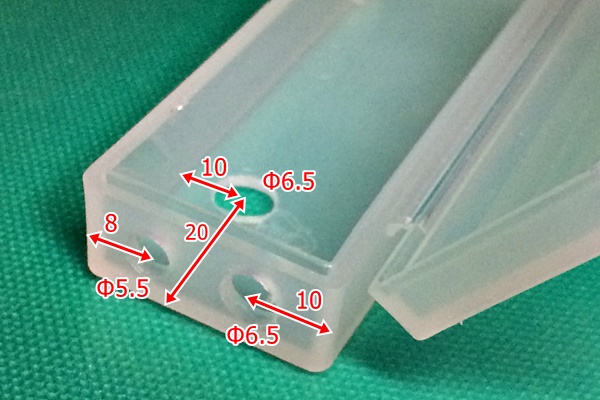
(2)さらにΦ12mmの穴をあけてから、下図のように加工する。

(3)電池ボックスからの線は短くて、引っ張るとすぐに切れそうなのでケーブルを変える。約30cmのダブルコードの先に、赤線と黒線をはんだ付けをして、熱収縮チューブで絶縁をする。結束バンドを縛って、引っ張られないようにして、ダブルコードを穴から外に出す。
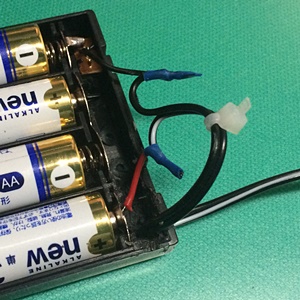
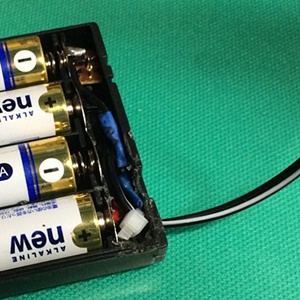
(4)電池ボックスからのコードは、ケースの内側からはめたコードブッシュを通してから、PHコネクタ付のケーブルをはんだ付けする。絶縁の熱収縮チューブと、結束バンドによる引っ張り防止をする。電池ボックスの黒線が、PHコネクタのどちら側なのかに注意をする。
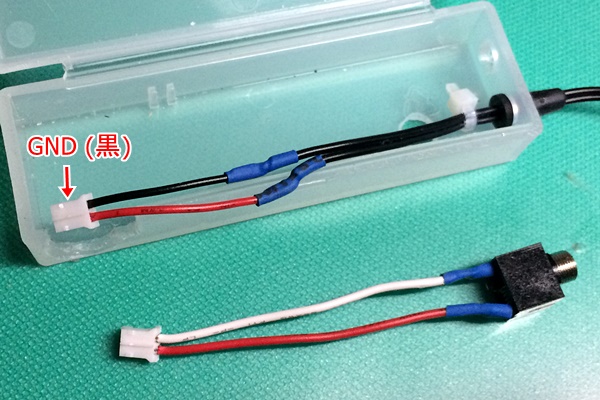
(5)モノラルミニジャックに、PHコネクタ付のケーブルをはんだ付けして、熱収縮チューブで絶縁をする。ケースの内側から穴に通して、外側からナットで締める。
(6)サーボモーターの一番長い腕の先端の2つの穴に、LEDの足を挿してからひねる。さらに、ホットボンドで固定する。


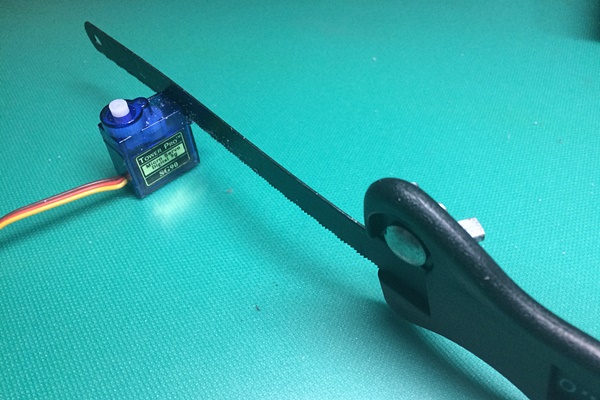
(7)サーボモーターの取り付け部は、両方とも切断する。こんな時には、Seria で買った金ノコの歯に持ち手が付いた道具が役立ちます。サーボモーターは、ケースにホットボンドで固定する。
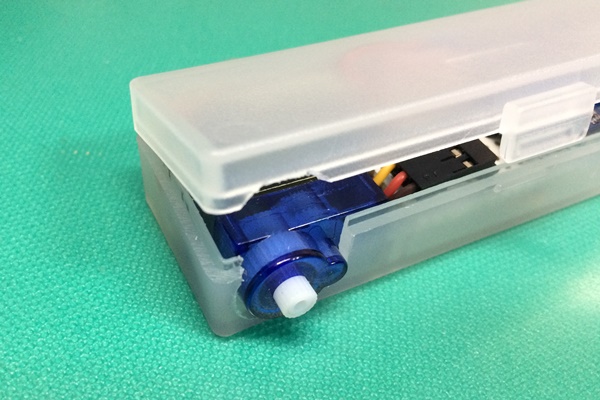
(8)モーターケーブルを、きれいに折り曲げて収める。ミニ三脚の雄ネジを、1/4インチ並目六角ナットでケースの内側から固定する。

(9)サーボモーターの位置のケースの蓋側を少し削る。
(10)作成した基板に、モーターからのケーブル、電池ボックスからのケーブル、モノラルジャックからのケーブルのコネクタを挿す。モーターケーブルは、写真の下側がGND(茶色) になるように注意する。

(2)さらにΦ12mmの穴をあけてから、下図のように加工する。
(3)電池ボックスからの線は短くて、引っ張るとすぐに切れそうなのでケーブルを変える。約30cmのダブルコードの先に、赤線と黒線をはんだ付けをして、熱収縮チューブで絶縁をする。結束バンドを縛って、引っ張られないようにして、ダブルコードを穴から外に出す。
(4)電池ボックスからのコードは、ケースの内側からはめたコードブッシュを通してから、PHコネクタ付のケーブルをはんだ付けする。絶縁の熱収縮チューブと、結束バンドによる引っ張り防止をする。電池ボックスの黒線が、PHコネクタのどちら側なのかに注意をする。
(5)モノラルミニジャックに、PHコネクタ付のケーブルをはんだ付けして、熱収縮チューブで絶縁をする。ケースの内側から穴に通して、外側からナットで締める。
(6)サーボモーターの一番長い腕の先端の2つの穴に、LEDの足を挿してからひねる。さらに、ホットボンドで固定する。
(7)サーボモーターの取り付け部は、両方とも切断する。こんな時には、Seria で買った金ノコの歯に持ち手が付いた道具が役立ちます。サーボモーターは、ケースにホットボンドで固定する。
(8)モーターケーブルを、きれいに折り曲げて収める。ミニ三脚の雄ネジを、1/4インチ並目六角ナットでケースの内側から固定する。
(9)サーボモーターの位置のケースの蓋側を少し削る。
(10)作成した基板に、モーターからのケーブル、電池ボックスからのケーブル、モノラルジャックからのケーブルのコネクタを挿す。モーターケーブルは、写真の下側がGND(茶色) になるように注意する。
●プログラム
外付けスイッチを押すと、モーターが60度回転してから元に戻ります。スイッチを押し続けても、すぐに戻ります。
SwitchToServo_200419.zip
SimpleServo ライブラリを使用しています。以下のサイトを参考にさせてもらいました。
SwitchToServo_200419.zip
SimpleServo ライブラリを使用しています。以下のサイトを参考にさせてもらいました。
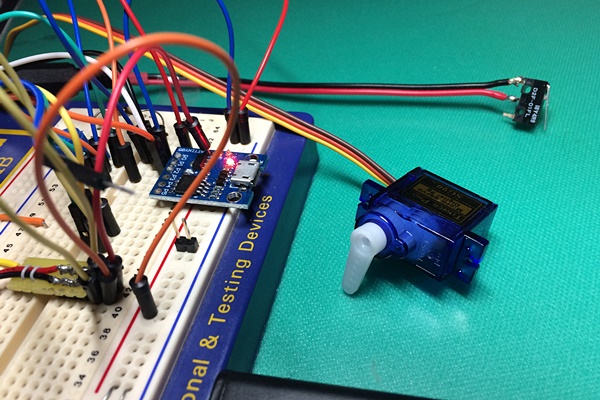
●おまけ
回路の検討と動作確認をするのは、こんな感じでやっています。
◆関連記事
- 【まほろば】手の中に収まるスイッチインターフェース
- 【まほろば】Digisparkにプログラムを書き込む
- 【まほろば】Digispark 開発環境のチェック
- 【まほろば】1スイッチでアプリ操作(設定)
- 【まほろば】手の中に収まるスイッチインターフェース 第3弾
- 【まほろば】手の中に収まるスイッチインターフェース 第4弾

